Q: Is real world fog still a good priod for foundation models?
We do see, however, deterioration (e.g. see muses evaluation, rds-camera noise model)
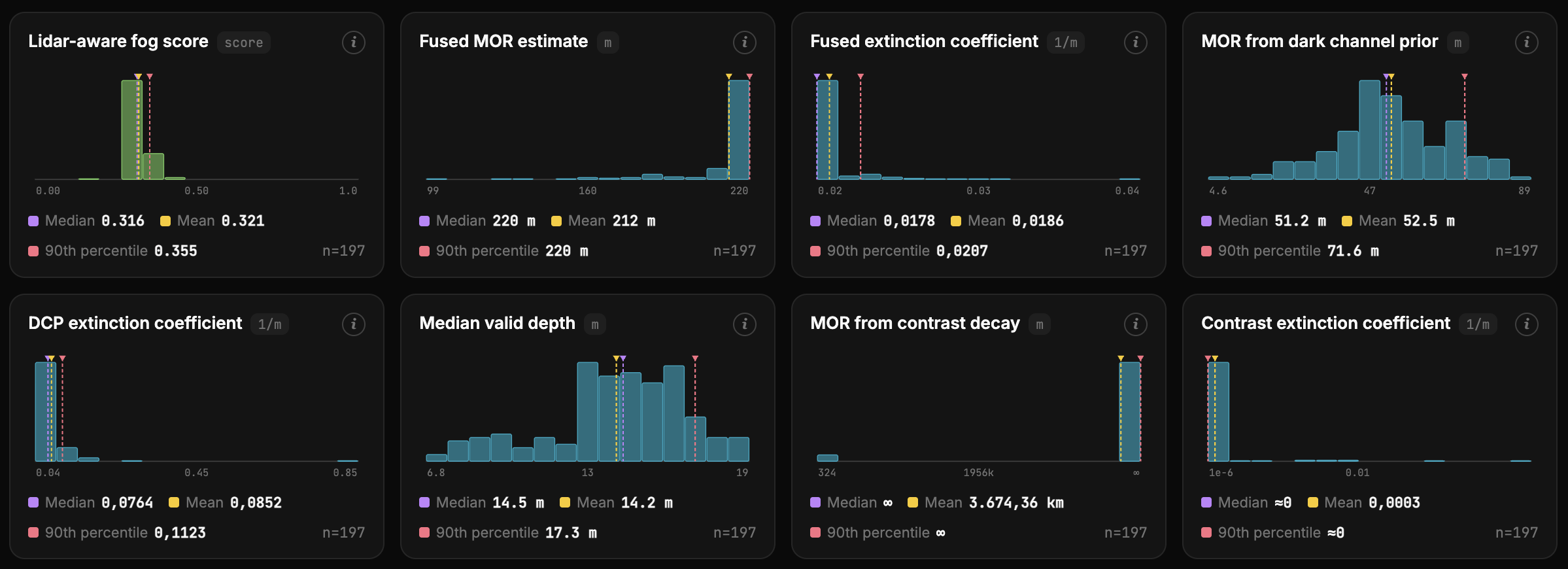
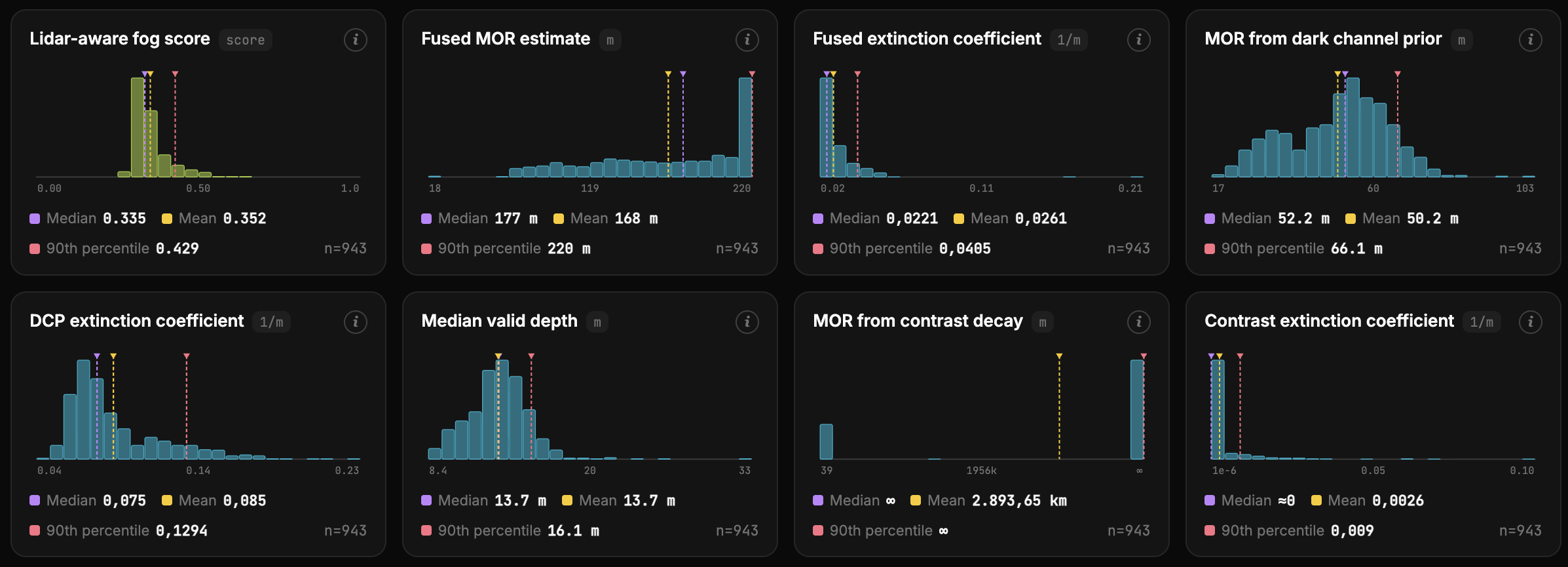
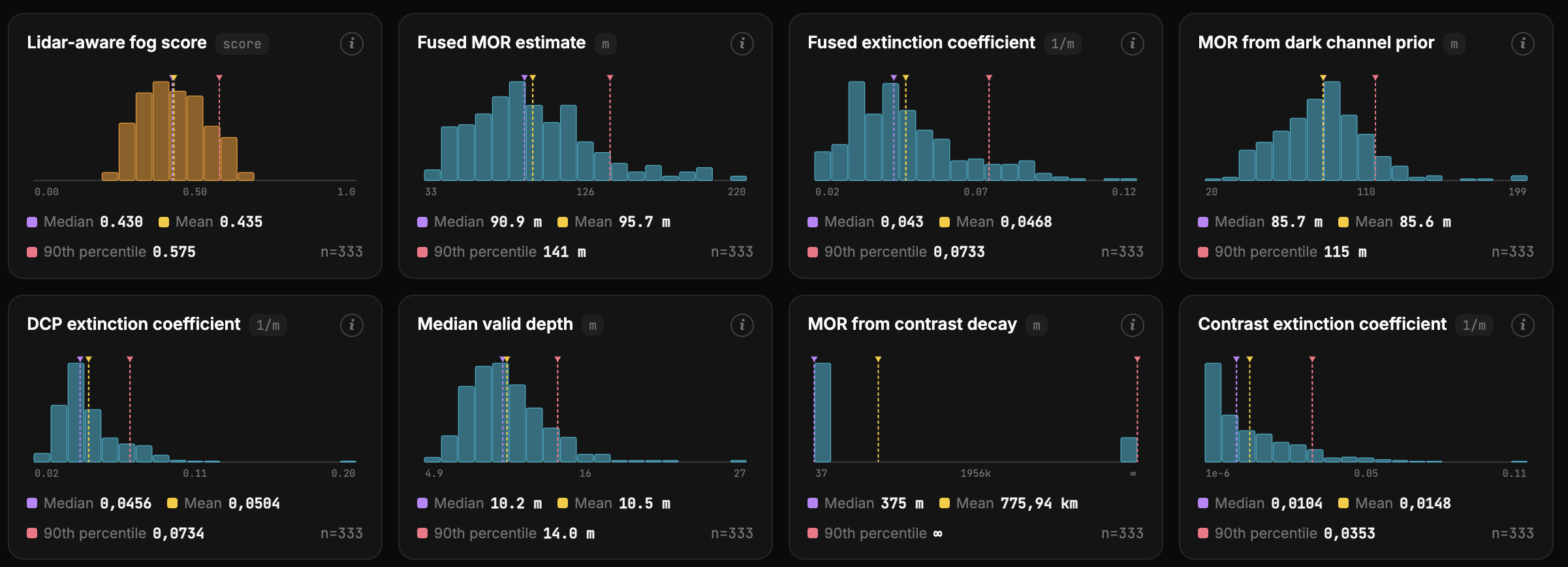
Fog density in SeeingThroughFog vs. Muses
Using the sparse LiDAR scans, and combining them with some heuristics from DCP and contrast mapping, even the "dense" split showed a much more "clear" split than the fog-split of muses.
{
"daytime": {
"day": false,
"night": true
},
"fog": {
"no": true,
"yes": {
"denseFog": false,
"lightFog": false
}
},
"infrastructure": {
"highway": false,
"inCity": true,
"suburban": false
},
"point_removed": 12,
"precipitation": {
"no": false,
"yes": {
"rain": true,
"snow": {
"heavySnow": false,
"lightSnow": false
}
}
},
"roadState": {
"dry": true,
"fullSnow": false,
"partialSnow": false,
"wet": false
},
"sidewalkState": {
"clean": true,
"partialSnow": false,
"snowCovered": false
},
"tunnel": false,
"twilight": false
}
Open / Going on
- Check original marigold by training on noisy data (exlusively)
- See at what noise level our model begins to fail
| Step | Intuition |
|---|---|
| Foggy (SeeingThroughFog ~ 13k) | Keep the real camera/fog look instead of synthesizing everything. |
| Estimate pseudo-depth | Use LiDAR + depth completion to know where fog should accumulate. |
| Clean unreliable LiDAR | Filter for valid LiDAR areas |
| Estimate local airlight | Dense fog color/brightness varies across sky, lamps, road, and cars. |
| Add incremental fog | Increase fog density on top of existing fog. (+ camera noise model / heterogenous fog etc.) |